|
yumapro
25.10-4
YumaPro SDK
|
|
yumapro
25.10-4
YumaPro SDK
|
YumaPro Subsystem Control Protocol. More...
#include <time.h>#include <sys/time.h>#include <xmlstring.h>#include "ncxtypes.h"#include "obj.h"#include "ses.h"#include "status_enum.h"#include "val.h"#include "tstamp.h"#include "ycontrol_types.h"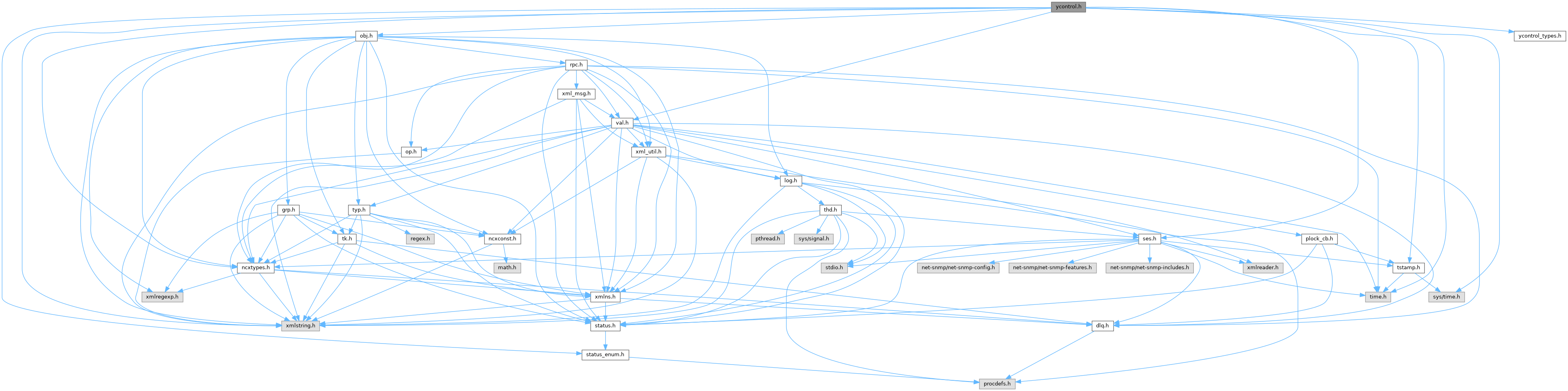
Go to the source code of this file.
Data Structures | |
| struct | ycontrol_service_t |
| callback functions for a service that registers with ycontrol More... | |
| struct | ycontrol_profile_t |
| control block for 1 ycontrol manager (only 1 used) More... | |
Macros | |
| #define | YCONTROL_DEF_RETRY_INTERVAL 5000 |
| number of milli-seconds to wait between re-connect retries More... | |
| #define | YCONTROL_DEF_MAX_RETRIES 5000 |
| max number of reconnect retries before giving up | |
| #define | SHUTDOWN_STATE(ST) |
| Check if in shutdown state. | |
| #define | YCONTROL_MAX_SERVICES 2 |
| this constant needs to be updated as more service types are implemented; currently only sil-sa, database planned | |
| #define | YCONTROL_MOD (const xmlChar *)"yumaworks-ycontrol" |
| YANG module for YControl protocol. | |
| #define | YCONTROL_OBJ (const xmlChar *)"ycontrol" |
| container name for YControl protocol | |
Typedefs | |
| typedef status_t(* | ycontrol_service_start_t) (void) |
| YControl Service Layer Start Callback Function. More... | |
| typedef status_t(* | ycontrol_service_stop_t) (ses_cb_t *scb) |
| YControl Service Layer Stop Callback Function. More... | |
| typedef status_t(* | ycontrol_service_msg_rcvr_t) (ses_cb_t *scb, ycontrol_msgtype_t msgtype, uint32 msgid, const xmlChar *server_id, ycontrol_msgbody_t msgbody_type, val_value_t *msgbody, boolean *response_sent) |
| YControl Service Layer Message Receiver Callback Function. More... | |
| typedef void(* | ycontrol_service_shutdown_t) (void) |
| YControl Service Layer Shutdown Callback Function. More... | |
| typedef void(* | ycontrol_timer_handler_t) (void) |
| YControl Service Layer Timer Handler Function. More... | |
| typedef void(* | ycontrol_service_reconnect_t) (void) |
| YControl Service Layer Reconnect Callback Function. More... | |
Enumerations | |
| enum | ycontrol_state_t { YCONTROL_ST_NONE , YCONTROL_ST_INIT , YCONTROL_ST_CONNECT , YCONTROL_ST_CONNECTING , YCONTROL_ST_WAIT_CONNECT_RETRY , YCONTROL_ST_CONNECTED , YCONTROL_ST_SHUTDOWN_REQ , YCONTROL_ST_DISCONNECTING , YCONTROL_ST_SHUTDOWN , YCONTROL_ST_SHUTDOWN_DONE } |
| ycontrol manager connection state enumerations More... | |
Functions | |
| status_t | ycontrol_init_ex (int argc, char *argv[], const xmlChar *subsys_id, boolean is_standby) |
| Initialize the YControl library. More... | |
| status_t | ycontrol_init_ex2 (int argc, char *argv[], const xmlChar *subsys_id, boolean is_standby, boolean quiet_mode) |
| Setup global vars before accepting any requests; extended 2. More... | |
| status_t | ycontrol_init2_ha (const char *server_id, const char *server_addr, uint16 server_port) |
| Phase 2 initialization for HA. More... | |
| void | ycontrol_init2_ha_thd (thd_tcb_t *tcb) |
| Setup scb->tcb for ycontrol session. More... | |
| void | ycontrol_cleanup_ex (boolean do_ncx_cleanup) |
| Cleanup ycontrol layer (extended) More... | |
| void | ycontrol_request_shutdown (void) |
| Request a control message handler shutdown. More... | |
| boolean | ycontrol_shutdown_requested (void) |
| Check if a control message handler shutdown is in progress. More... | |
| status_t | ycontrol_register_service2 (const xmlChar *service_name, ycontrol_service_start_t service_start, ycontrol_service_stop_t service_stop, ycontrol_service_msg_rcvr_t service_rcvr, ycontrol_service_shutdown_t service_shut, ycontrol_service_reconnect_t service_reconnect) |
| Register a specific service with the YumaPro control message manager Add a reconnect callback. More... | |
| void | ycontrol_unregister_service (const xmlChar *service_name) |
| Unregister a specific service. More... | |
| void | ycontrol_service_start (void) |
| Start the registered services. More... | |
| void | ycontrol_service_stop (void) |
| Stop the registered services. More... | |
| status_t | ycontrol_send_ex (const xmlChar *service_id, uint32 *msgid, ycontrol_msgtype_t msgtype, val_value_t *service_payload, status_t msg_status, const xmlChar *txid_str) |
| Send a YControl message (extended) More... | |
| status_t | ycontrol_send_ex2 (const xmlChar *service_id, uint32 *msgid, ycontrol_msgtype_t msgtype, val_value_t *service_payload, status_t msg_status, boolean with_origin, const xmlChar *txid_str) |
| Send a YControl message (extended2) More... | |
| status_t | ycontrol_send_error (const xmlChar *service_id, uint32 *msgid, status_t msg_status, uint32 error_index, const xmlChar *error_message, const xmlChar *txid_str) |
| Send a YControl <error> message. More... | |
| status_t | ycontrol_send_ok (const xmlChar *service_id, uint32 *msgid, const xmlChar *txid_str) |
| Send a YControl <ok> message. More... | |
| boolean | ycontrol_dispatch_msg (ses_cb_t *scb) |
| Find the appropriate service handler and call it with the incoming message from the server. More... | |
| void | ycontrol_setup_reconnect (void) |
| Setup the YControl profile to reconnect after the retry interval with the incoming message from the server. More... | |
| void | ycontrol_set_timer_handler (ycontrol_timer_handler_t timer_handler) |
| Set the timer callback handler. More... | |
| void | ycontrol_set_retry_interval (int retry_int) |
| Set the re-connect retry interval. More... | |
| const xmlChar * | ycontrol_get_subsys_id (void) |
| Get the subsystem ID string. More... | |
| void | ycontrol_set_retry_limit (uint16 retry_limit) |
| Set the re-connect retry limit. More... | |
| status_t | ycontrol_set_server_root (const char *server_root) |
| Set the server-root when running in Multi-Instance Mode. More... | |
| void | ycontrol_service_reconnect (void) |
| Start the main server reconnect for the registered services. More... | |
YumaPro Subsystem Control Protocol.
 1.9.5
1.9.5