|
yumapro
25.10-3
YumaPro SDK
|
|
yumapro
25.10-3
YumaPro SDK
|
YControl core functions are used by the application to control and integrate with the YControl protocol handler. More...

Functions | |
| status_t | ycontrol_init_ex (int argc, char *argv[], const xmlChar *subsys_id, boolean is_standby) |
| Initialize the YControl library. More... | |
| status_t | ycontrol_init_ex2 (int argc, char *argv[], const xmlChar *subsys_id, boolean is_standby, boolean quiet_mode) |
| Setup global vars before accepting any requests; extended 2. More... | |
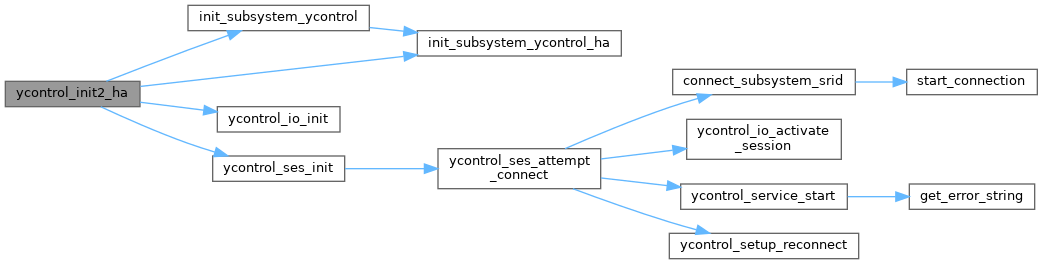
| status_t | ycontrol_init2_ha (const char *server_id, const char *server_addr, uint16 server_port) |
| Phase 2 initialization for HA. More... | |
| void | ycontrol_init2_ha_thd (thd_tcb_t *tcb) |
| Setup scb->tcb for ycontrol session. More... | |
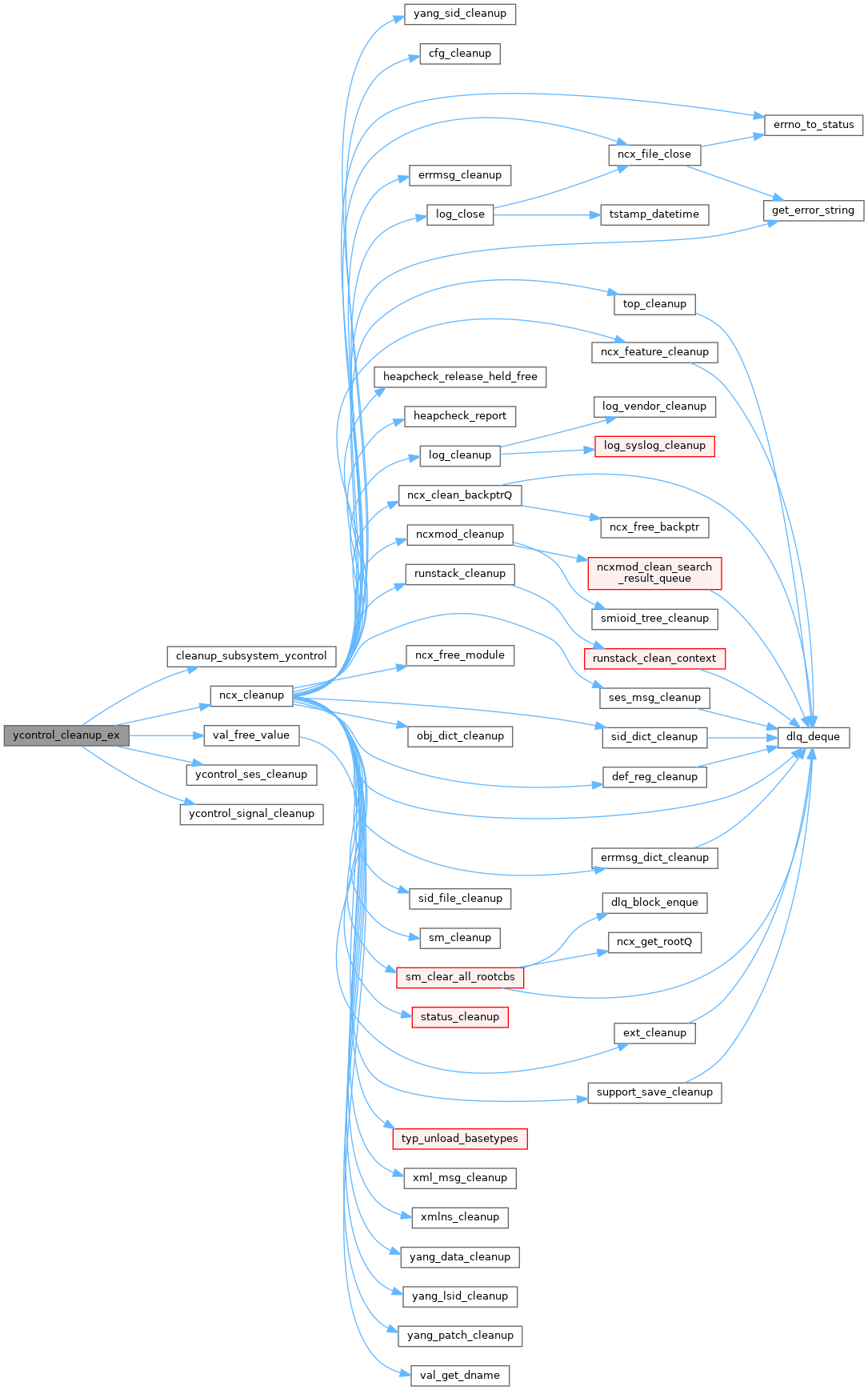
| void | ycontrol_cleanup_ex (boolean do_ncx_cleanup) |
| Cleanup ycontrol layer (extended) More... | |
| void | ycontrol_request_shutdown (void) |
| Request a control message handler shutdown. More... | |
| boolean | ycontrol_shutdown_requested (void) |
| Check if a control message handler shutdown is in progress. More... | |
| status_t | ycontrol_register_service2 (const xmlChar *service_name, ycontrol_service_start_t service_start, ycontrol_service_stop_t service_stop, ycontrol_service_msg_rcvr_t service_rcvr, ycontrol_service_shutdown_t service_shut, ycontrol_service_reconnect_t service_reconnect) |
| Register a specific service with the YumaPro control message manager Add a reconnect callback. More... | |
| void | ycontrol_unregister_service (const xmlChar *service_name) |
| Unregister a specific service. More... | |
| void | ycontrol_service_start (void) |
| Start the registered services. More... | |
| void | ycontrol_service_stop (void) |
| Stop the registered services. More... | |
| status_t | ycontrol_send_ex (const xmlChar *service_id, uint32 *msgid, ycontrol_msgtype_t msgtype, val_value_t *service_payload, status_t msg_status, const xmlChar *txid_str) |
| Send a YControl message (extended) More... | |
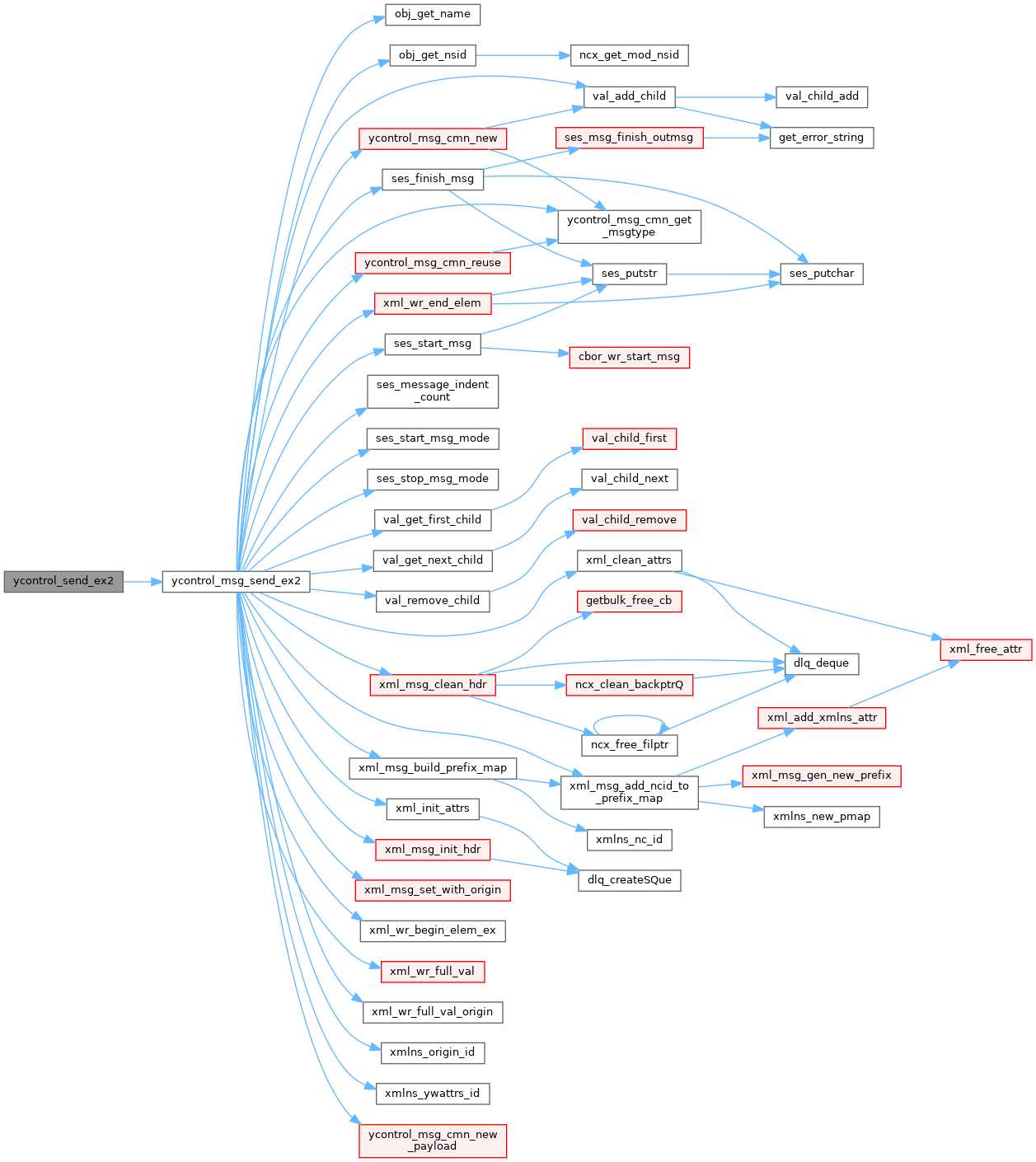
| status_t | ycontrol_send_ex2 (const xmlChar *service_id, uint32 *msgid, ycontrol_msgtype_t msgtype, val_value_t *service_payload, status_t msg_status, boolean with_origin, const xmlChar *txid_str) |
| Send a YControl message (extended2) More... | |
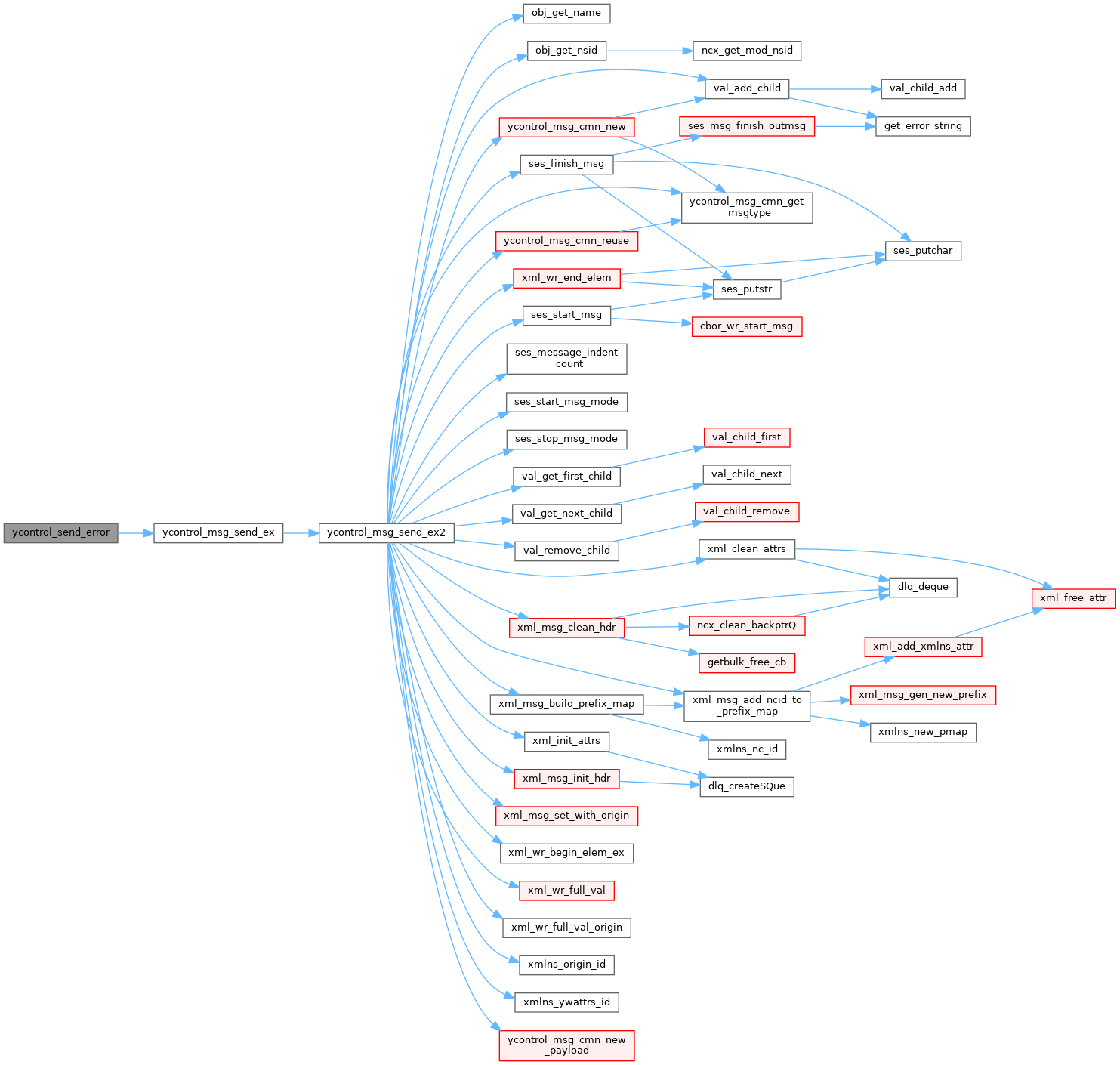
| status_t | ycontrol_send_error (const xmlChar *service_id, uint32 *msgid, status_t msg_status, uint32 error_index, const xmlChar *error_message, const xmlChar *txid_str) |
| Send a YControl <error> message. More... | |
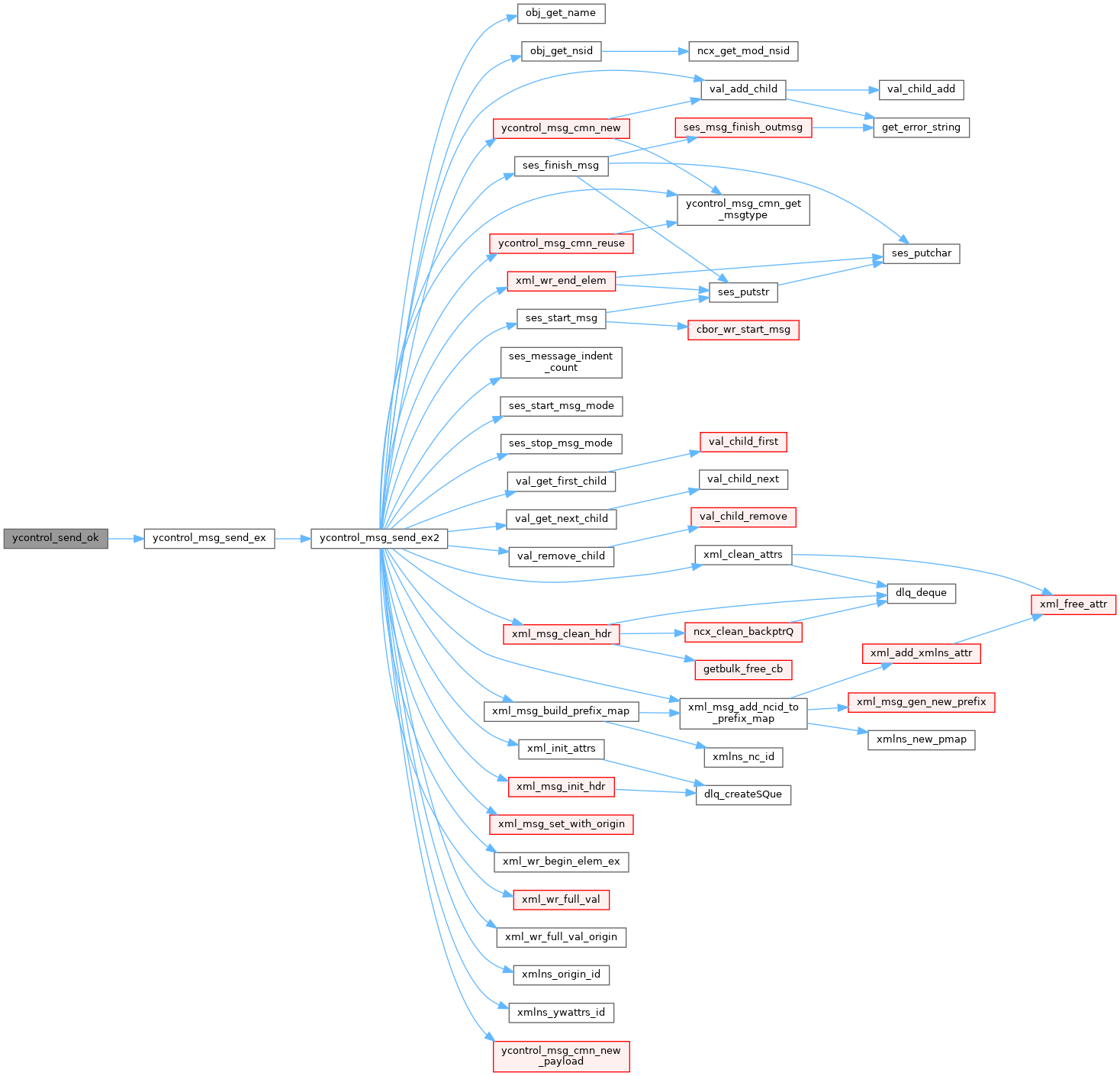
| status_t | ycontrol_send_ok (const xmlChar *service_id, uint32 *msgid, const xmlChar *txid_str) |
| Send a YControl <ok> message. More... | |
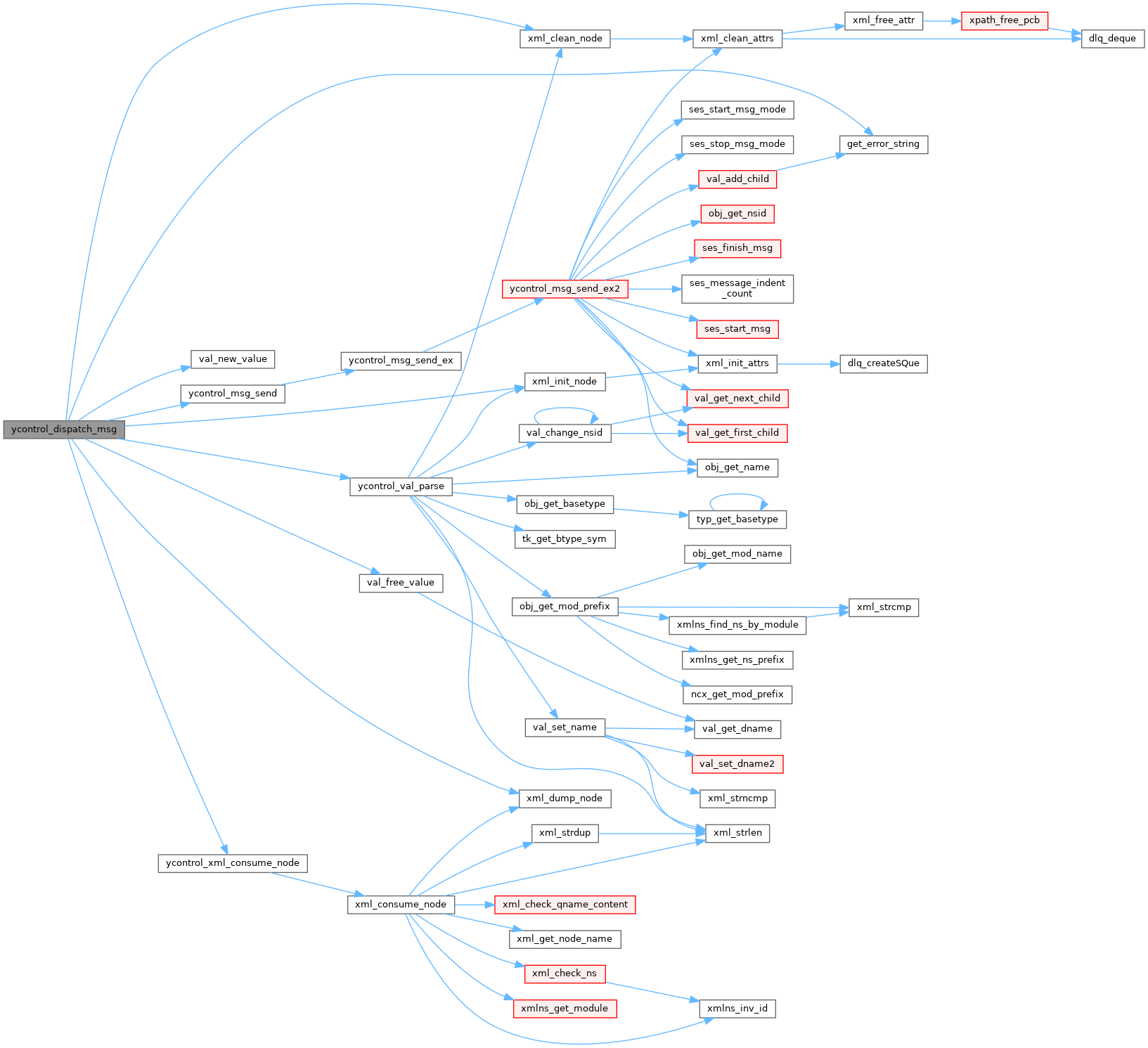
| boolean | ycontrol_dispatch_msg (ses_cb_t *scb) |
| Find the appropriate service handler and call it with the incoming message from the server. More... | |
| void | ycontrol_setup_reconnect (void) |
| Setup the YControl profile to reconnect after the retry interval with the incoming message from the server. More... | |
| void | ycontrol_set_timer_handler (ycontrol_timer_handler_t timer_handler) |
| Set the timer callback handler. More... | |
| void | ycontrol_set_retry_interval (int retry_int) |
| Set the re-connect retry interval. More... | |
| const xmlChar * | ycontrol_get_subsys_id (void) |
| Get the subsystem ID string. More... | |
| void | ycontrol_set_retry_limit (uint16 retry_limit) |
| Set the re-connect retry limit. More... | |
| status_t | ycontrol_set_server_root (const char *server_root) |
| Set the server-root when running in Multi-Instance Mode. More... | |
| void | ycontrol_service_reconnect (void) |
| Start the main server reconnect for the registered services. More... | |
YControl core functions are used by the application to control and integrate with the YControl protocol handler.
Each YControl session is between one subsystem and one main server.
Most functions in this module are user APIs for subsystem use only!
| void ycontrol_cleanup_ex | ( | boolean | do_ncx_cleanup | ) |
Cleanup ycontrol layer (extended)
Called by the application to cleanup resources. Must call if ycontrol_init function variant called. FUNCTION ycontrol_cleanup_ex
Cleanup all vars before exit
| do_ncx_cleanup | TRUE to cleanup NCX |

| boolean ycontrol_dispatch_msg | ( | ses_cb_t * | scb | ) |
Find the appropriate service handler and call it with the incoming message from the server.
| scb | session control block containing the xmlreader set at the start of an incoming message. |

| const xmlChar * ycontrol_get_subsys_id | ( | void | ) |
Get the subsystem ID string.
| status_t ycontrol_init2_ha | ( | const char * | server_id, |
| const char * | server_addr, | ||
| uint16 | server_port | ||
| ) |
Phase 2 initialization for HA.
Setup connection to server with YP-HA Standby Role support The main server connection will be to the main server on another system, not the server expected to be found on this system.
| server_id | server ID to use in registration to main server |
| server_addr | host address of the main server to connect to |
| server_port | TCP port of the main server to connect to |
| void ycontrol_init2_ha_thd | ( | thd_tcb_t * | tcb | ) |
Setup scb->tcb for ycontrol session.
Only present if PTHREADS=1.
| tcb | tcb to assign to the ycontrol session |
| status_t ycontrol_init_ex | ( | int | argc, |
| char * | argv[], | ||
| const xmlChar * | subsys_id, | ||
| boolean | is_standby | ||
| ) |
Initialize the YControl library.
Extended for YP-HA.
Setup global vars before accepting any requests. Process all the CLI parameters. There is no .conf file for a subsystem.
| argc | argument count |
| argv | argument array |
| subsys_id | default sub-system identifier if no –subsys-id CLI parm is found |
| is_standby | true if agt_yp_ha_standby is calling; this will cause ycontrol_signal to be skipped |
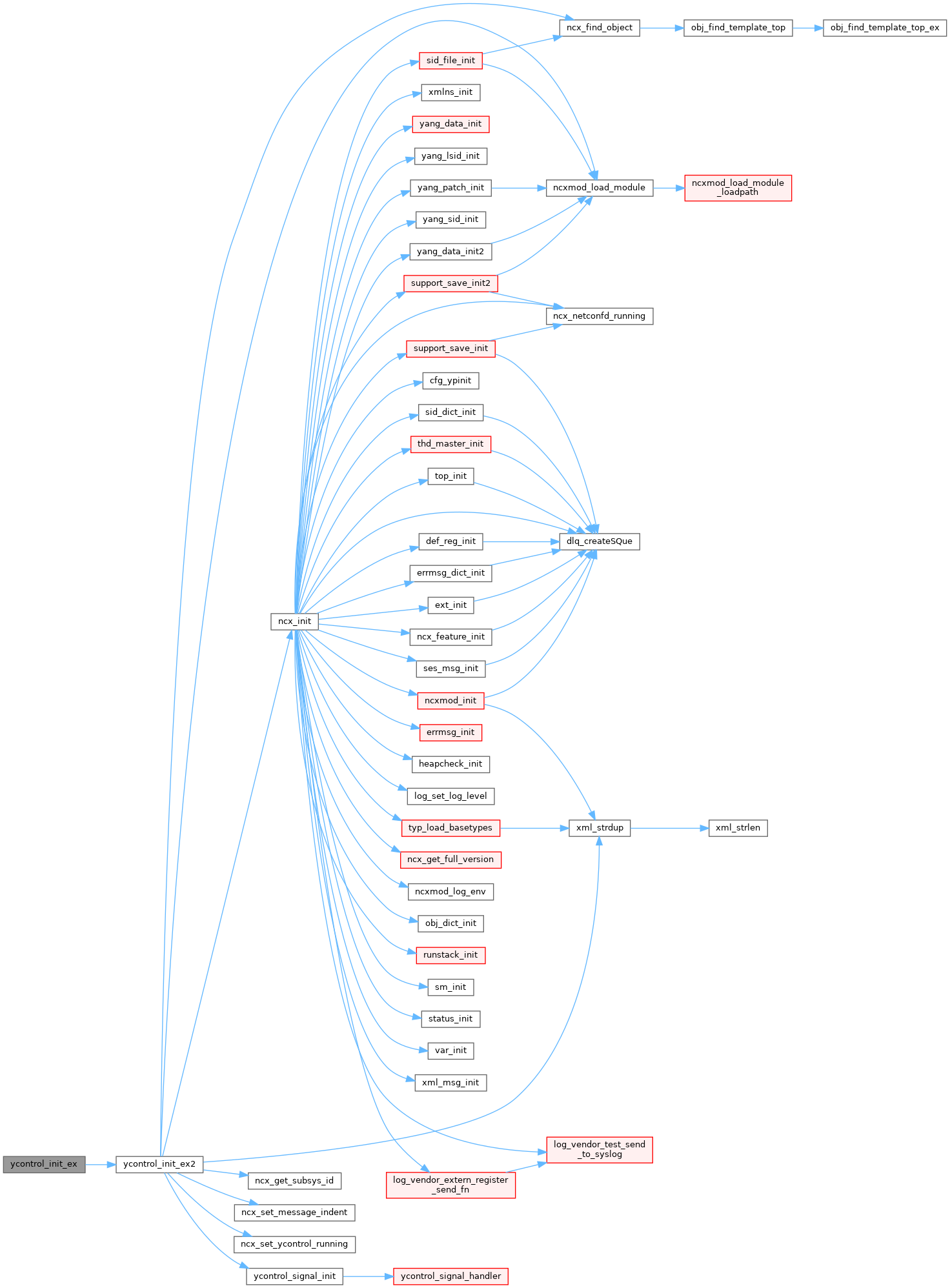
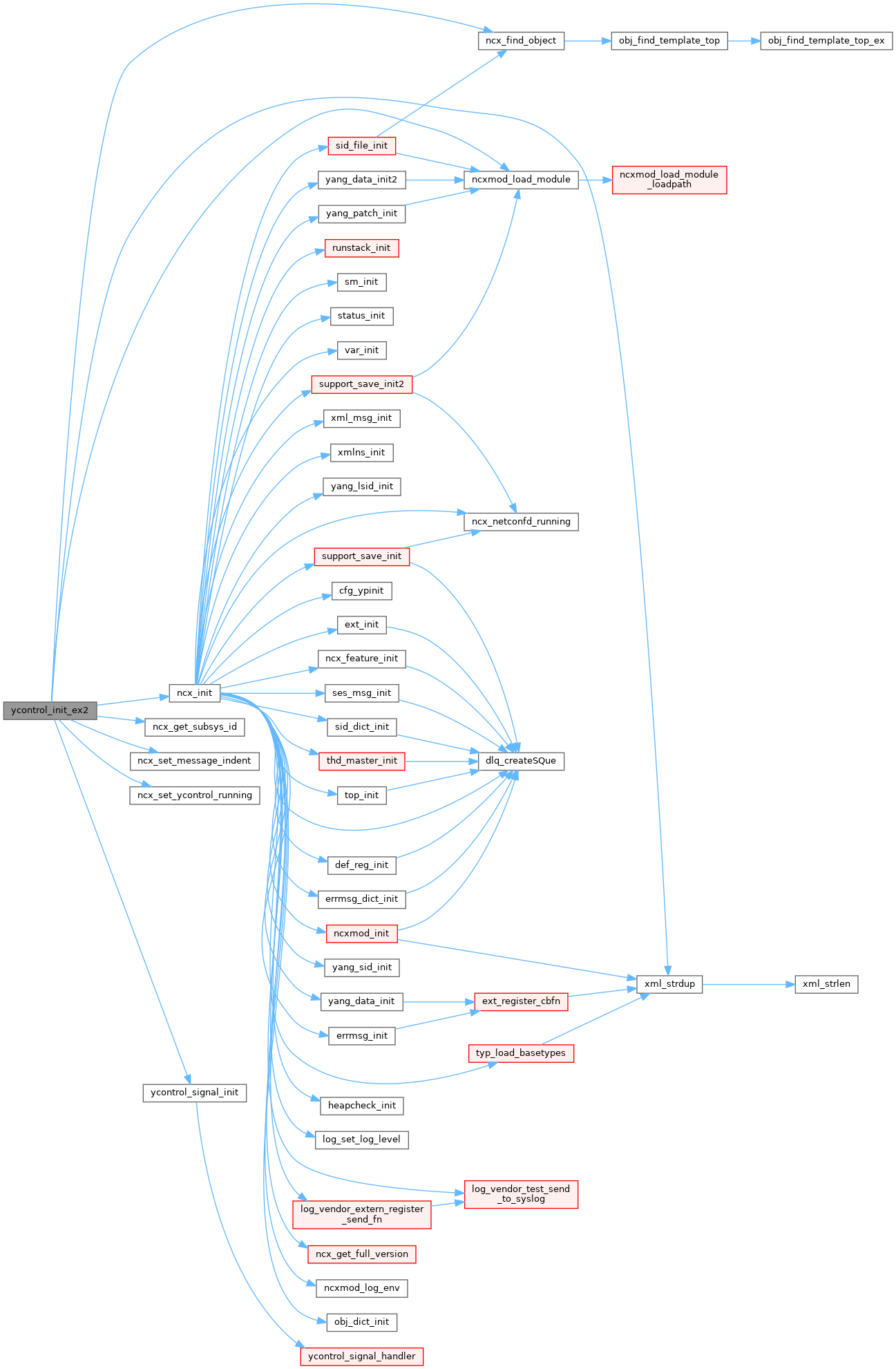
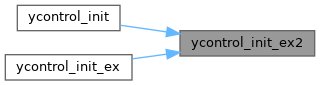
| status_t ycontrol_init_ex2 | ( | int | argc, |
| char * | argv[], | ||
| const xmlChar * | subsys_id, | ||
| boolean | is_standby, | ||
| boolean | quiet_mode | ||
| ) |
Setup global vars before accepting any requests; extended 2.
Setup global vars before accepting any requests. Process all the CLI parameters. There is no .conf file for a subsystem.
| argc | argument count |
| argv | argument array |
| subsys_id | default sub-system identifier if no –subsys-id CLI parm is found |
| is_standby | true if agt_yp_ha_standby is calling; this will cause ycontrol_signal to be skipped |
| quiet_mode | true: do not log_info starting ycontrol false: normal init messages |
| status_t ycontrol_register_service2 | ( | const xmlChar * | service_name, |
| ycontrol_service_start_t | service_start, | ||
| ycontrol_service_stop_t | service_stop, | ||
| ycontrol_service_msg_rcvr_t | service_rcvr, | ||
| ycontrol_service_shutdown_t | service_shut, | ||
| ycontrol_service_reconnect_t | service_reconnect | ||
| ) |
Register a specific service with the YumaPro control message manager Add a reconnect callback.
Officially only YumaPro services are supported but the YControl layer does not check.
All callback functions need to be provided except service_reconnect. Ycontrol does not check if these callbacks are present.
Only the receiver callback is technically required to do anything. It MUST send a subsys-response if a server-request is received.
| service_name | unique name of the service |
| service_start | service start callback |
| service_stop | service stop callback |
| service_rcvr | Message receiver callback |
| service_shut | service shutdown callback |
| service_reconnect | service reconnect callback (may be NULL) |


| void ycontrol_request_shutdown | ( | void | ) |
Request a control message handler shutdown.
This is the correct way to shutdown YControl from the application.

| status_t ycontrol_send_error | ( | const xmlChar * | service_id, |
| uint32 * | msgid, | ||
| status_t | msg_status, | ||
| uint32 | error_index, | ||
| const xmlChar * | error_message, | ||
| const xmlChar * | txid_str | ||
| ) |
Send a YControl <error> message.
| service_id | service sending this message |
| msgid | address of message ID; for response this is non-zero |
| msg_status | NO_ERR or error status for message; ignored if service_payload is non-NULL |
| error_index | error index if sending an <error> response |
| error_message | error message if sending an <error> response |
| txid_str | transaction-id string to add (may be NULL to skip) |
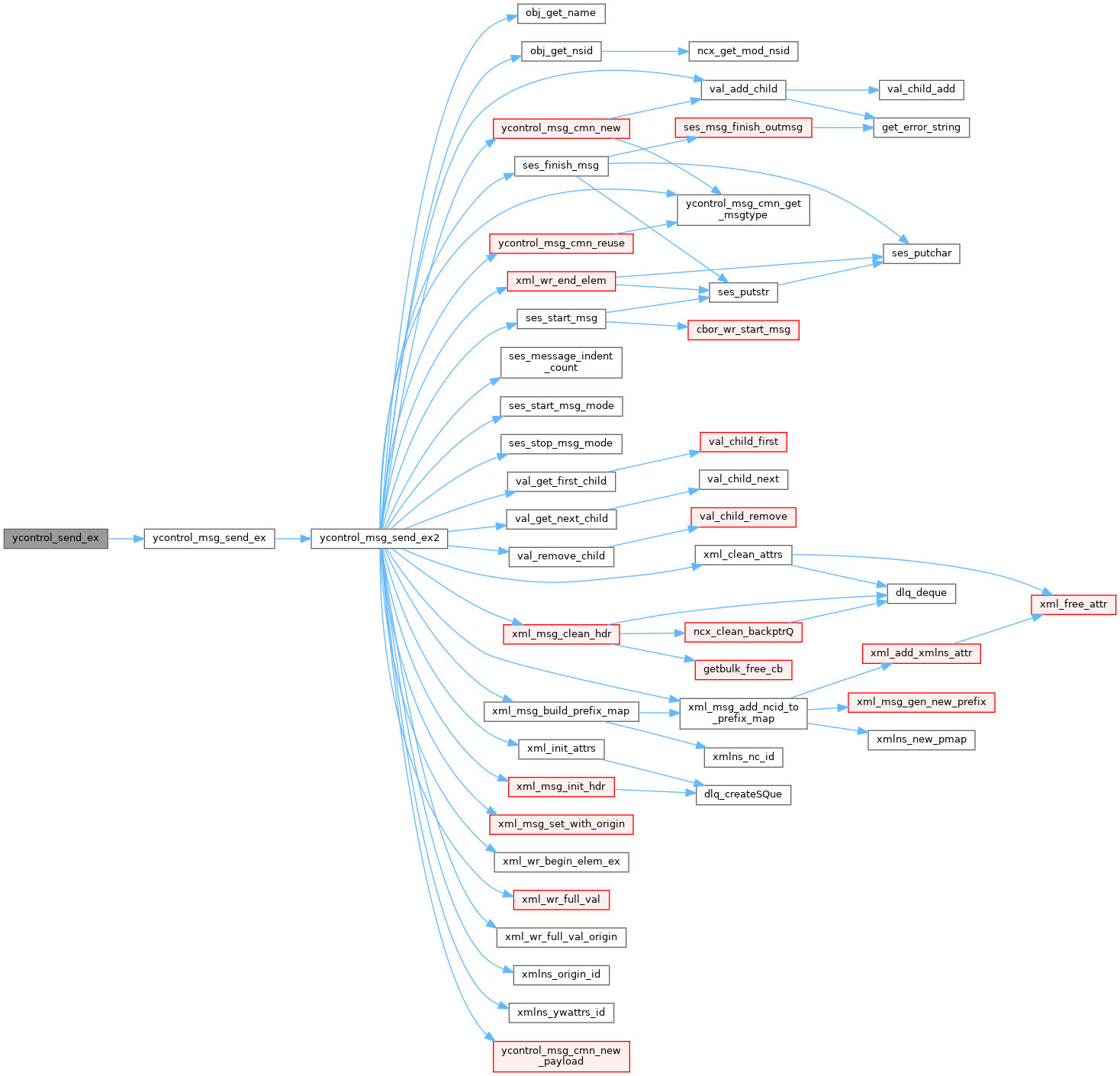
| status_t ycontrol_send_ex | ( | const xmlChar * | service_id, |
| uint32 * | msgid, | ||
| ycontrol_msgtype_t | msgtype, | ||
| val_value_t * | service_payload, | ||
| status_t | msg_status, | ||
| const xmlChar * | txid_str | ||
| ) |
Send a YControl message (extended)
| service_id | service sending this message | |
| [out] | msgid | address of message ID; for response this is non-zero *msgid set to the message ID assigned to the msg, if msgid non-NULL |
| msgtype | type of YControl message to send | |
| service_payload | val_value_t tree to add to message payload NULL if not used | |
| msg_status | NO_ERR or error status for message; ignored if service_payload is non-NULL | |
| txid_str | transaction-id string |
| status_t ycontrol_send_ex2 | ( | const xmlChar * | service_id, |
| uint32 * | msgid, | ||
| ycontrol_msgtype_t | msgtype, | ||
| val_value_t * | service_payload, | ||
| status_t | msg_status, | ||
| boolean | with_origin, | ||
| const xmlChar * | txid_str | ||
| ) |
Send a YControl message (extended2)
| service_id | service sending this message | |
| [out] | msgid | address of message ID; for response this is non-zero *msgid set to the message ID assigned to the msg, if msgid non-NULL |
| msgtype | type of YControl message to send | |
| service_payload | val_value_t tree to add to message payload NULL if not used | |
| msg_status | NO_ERR or error status for message; ignored if service_payload is non-NULL | |
| with_origin | TRUE to set origin attibutes (used for NMDA GET) | |
| txid_str | transaction-id string |
| status_t ycontrol_send_ok | ( | const xmlChar * | service_id, |
| uint32 * | msgid, | ||
| const xmlChar * | txid_str | ||
| ) |
Send a YControl <ok> message.
| service_id | service sending this message |
| msgid | address of message ID; for response this is non-zero |
| txid_str | transaction-id string to add (may be NULL to skip) |
| void ycontrol_service_reconnect | ( | void | ) |
Start the main server reconnect for the registered services.
Called from internal message handler. Not a user API.

| void ycontrol_service_start | ( | void | ) |
Start the registered services.
Called from internal message handler. Not a user API.


| void ycontrol_service_stop | ( | void | ) |
Stop the registered services.
Called from internal message handler. Not a user API.

| void ycontrol_set_retry_interval | ( | int | retry_int | ) |
Set the re-connect retry interval.
| retry_int | number of milliseconds to wait (5000 = 5 seconds) must be >= 50 |
| void ycontrol_set_retry_limit | ( | uint16 | retry_limit | ) |
Set the re-connect retry limit.
| retry_limit | max number of connect attempts to make (1..max) |
| status_t ycontrol_set_server_root | ( | const char * | server_root | ) |
Set the server-root when running in Multi-Instance Mode.
| server_root | server_root string to set |

| void ycontrol_set_timer_handler | ( | ycontrol_timer_handler_t | timer_handler | ) |
Set the timer callback handler.
Only 1 is allowed!!
This is an internal API used for reconnections.
| timer_handler | timer callback to use; NULL to clear |

| void ycontrol_setup_reconnect | ( | void | ) |
Setup the YControl profile to reconnect after the retry interval with the incoming message from the server.
The server dropped the connection or crashed.

| boolean ycontrol_shutdown_requested | ( | void | ) |
Check if a control message handler shutdown is in progress.

| void ycontrol_unregister_service | ( | const xmlChar * | service_name | ) |
Unregister a specific service.
| service_name | service to unregister |
 1.9.5
1.9.5